advertisement
Robot Systems: Hardware Overview
Building a robot from scratch involves choosing the right software and hardware. In the previous article, I explained the various libraries that help the robot to move, sense, navigate and control. Now this article explains the hardware side: the computers, the motors, the sensors to equip the robot with. As in my previous article, this list is not exhaustive, but it lists the components that I found during my research and that I consider interesting to maintain here.
This article originally appeared on my blog.
Single board computers
A single board computer is the core component on which the robotic middleware is installed. It will provide the computing power needed to form the essential abstraction of your robot. You will also receive and coordinate messages received from your individual parties. And it is also the component that receives and analyzes central control commands.
Raspberry Pi 4
- 1.5 Ghz quad-core ARM Cortex-72 processor, 1-8 GB RAM
- Product page
Supersonic Nano
- ARM A57 quad-core 1.43 GhZ, 4 GB RAM
-128-core Maxwell GPU
- Product page
BeagleBoard X15
- 1.5 GHz ARM Cortex-A15, 2 GB RAM
- Product page
Microcontrollers
Microcontrollers are small computers that are programmed to perform a very specific task on your robot, such as reading and processing sensor data or controlling your robot's motors.
Arduino UNO
- ATmga328P MCU, 2KB RAM
- Family of microcontrollers with multiple configurations.
- Wikipedia page
Arduino Nano
-ATmga328P MCU
- Same features as the Arduino Nano, but compatible with breadboards and smaller design
- Wikipedia page
feather boards
- Family of microcontrollers, very similar to Arduino, produced by the AdaFruit company
- Wikipedia page
- Product list
Seeduino
-ATmga328P MCU
- Placas compatibles con Arduino, que cuentan con una conexión Micro-USB y pueden integrarse perfectamente con otras placas de la familia de módulos Grove
- Product page
pocket beagle
-OSD3358 ARM 1 GHz, 512 MB RAM
- USB and MicroSD connectors
- Product page
NodeMCU v2
- ATmga328P MCU, 128KB RAM
-Compatible with Arduino, built-in Wifi,
- IoT platform
- Wikipedia page
Argon Wifi Development Board
- ARM Cortex-M4F 32-bi, 4 MB RAM
- MicroUSB connection
- Product page
Espressif ESP8266 Systems
- 32-bit RISC L106, 80 KB RAM
- Wikipedia page
Espressif Systems ESP32
- Tensilica Xtensa LX6 microprocessor, 520 KB RAM
- Built-in WiFi, SD card reader
- Successor of ESP8266
- Wikipedia page
ST Microelectronics STM32
- ARM Cortex-M4F/M7F
- Family of ARM-based Microcontrollers
- Provided as Arduino or Discovery boards (for debugging purposes)
- Wikipedia page
Teenager 3.6
- ARM Cortex M4 processor, 256 KB of RAM
-Arduino compatible
- USB and MicroSD connectors
- Product page
MSP430 launch pad
- Microcontroller development board
- Product page
Wifi Netduino N3
- ARM Cortex M4 processor, 256 KB of RAM
- Built-in WiFi, SD card reader
- Wikipedia page
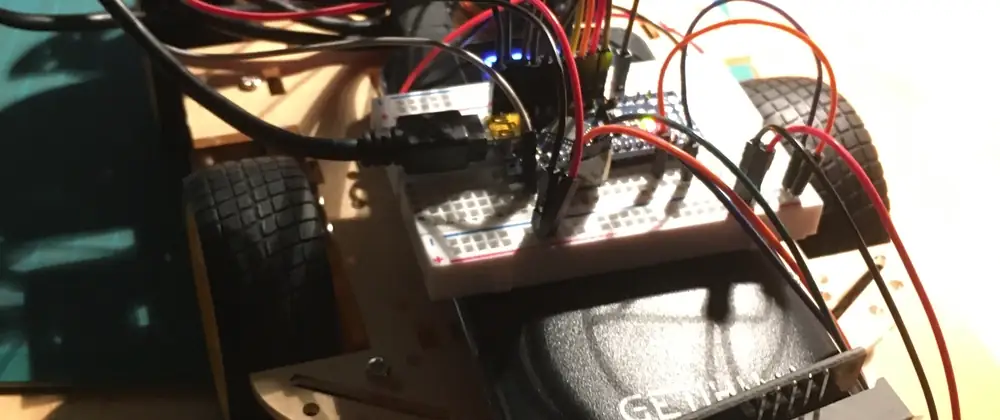
Chassis
The chassis forms one of the main appearances of the robot: how it moves and interacts with the world. Here I only list the chassis types and link them to concrete examples.
2 wheels + wheel
4 wheels
Tracks
Continuous Belt
Quadrupled
engines
Motors serve different functions in your robot. Thinking from the bottom up, start with movements on the ground, continue with the joints that move the arms and fine precision motors for grasping objects. In this category, I will explain the different types of engines and how they work. For a detailed explanation, read this very detailed article.
Synchronous AC motor
- The stator produces a constant magnetic field that powers the rotor.
- Once accelerated, the motor produces a constant torque.
AC asynchronous/induction
- The stator produces a magnetic field that powers the rotor.
- Magnetic bias in the stator changes the motor torque.
Brushed DC Motor
- in
advertisement
Related Articles



advertisement